-- Viskositätsmessung mit axialem Ringspalt --IMERTER M5 DiVA: real-flow-Axiorheometrie
- Quellenangabe: IMETER DiVA M5/M20 von Thomas Petzoldt und Michael Breitwieser - In den unten stehenden Abbildungen ist links die Skizze des Aufbaus zu IMETER M5 "DiVA", und rechts ein Foto demgemäßen Modells abgebildet.
Funktion der Strömungsgeschwindigkeit im RingspaltDie Herleitung der IMETER-Ringspaltgleichung ist ähnlich zum Hagen-Poiseuillesches Gesetz und ist fundamental Navier-Stokes ~ Mit DiVA messen wir jedoch lineare Kräfte und nicht Volumen oder Drehmomente, weshalb die Formulierungen dementsprechend gestaltet sind. Die Kraft (Fs) die zwischen einer Flüssigkeit und einer Zylinder-Mantelfläche (2πrh) übertragen wird, ist proportional zur Viskosität (η), der Flüssigkeit und zum Geschwindigkeitsgradient (vz'): Der Kraft (Fp) über dem Mantelflächenelement und auf die Stirnsseite des Zylinders bezogen entspricht dem Druckabfall (Δp):
Druckabfall und viskositätsbedingter Strömungsverlust entsprechen einander. Aktio=Reaktio. Wir messen die Kraft Fp über die Kraft, die am Zylindermesskörper angreift. Differentialgleichung für die Strömungsgeschwindigkeit als Funktion des Radius:
Die Differentialgleichung wird zweimal integriert
und liefert entsprechend zwei Integrationskonstanten (C1, C2). Diese werden aus den Randbedingungen der Geschwindigkeiten auf den beiden Grenzflächen ermittelt.
Viskosität als Funktion der KraftDas pro Zeit aufgrund der Relativbewegung des Messkörpers bewegte Volumen ist gleich dem Volumen, das durch den Ringspalt strömt. Das bestimmte Integral wird ausgerechnet, die Konstanten werden eingesetzt und nach einigen Umformungen der Gleichung ergibt sich die folgende Lösung für die Viskosität:
Mit der obigen Beziehung wird die Viskosität und der Druckabfall aus der Funktion der Strömungsgeschwindigkeit eliminiert.
Die an der Wägezelle gemessene Kraftdifferenz FW ergibt sich aus der Summe zweier Kräfte. Einerseits wirkt auf den Querschnitt des Messkörpers die durch Strömungsverlust bedingte Druckdifferenz. Andererseits wirkt auf der Mantelfläche des Messkörpers die durch Viskosität des Fluids bedingte Schubspannung. Hierbei ist zu beachten, dass ein positives Vorzeichen dieser Kraft FW entsprechend der Skizze zum Versuchsaufbau in positiver z-Richtung als aufwärts gerichtet definiert wird. Durch Einsetzen und Umformen werden letztlich die folgenden Beziehungen für die Kraftdifferenz sowie die Viskosität erhalten:
(Die IMETER-Ringspaltgleichung)
Messunsicherheit / FehlerbetrachtungAls Grundlage der physikalischen Messunsicherheitsberechung zur Einschätzung möglicher Fehler werden die entprechenden partiellen Ableitungen zu den Variablen von Messung und Messkörpern gebildet (Sensivitätskoeffizienten):
Mit den folgenden beispielhaften und realistischen Eingabewerten ... wird die Kalkulation entsprechend durchgeführt: Am Ergebnis der Beispielrechnung zur Viskosität zeigt sich, dass wesentliche Fehlerbeiträge aus der Bestimmung der Radien von Messkörper und Flüssigkeitsbehälter resultieren. Aus dem Rechenbeispiel ist erkennbar, dass bereits bei vergleichsweise grober Bestimmtheit der geometrischen Verhältnisse ab initio erhaltene Resultate recht genau sein können. KorrekturenEine der Herausragenden Eigenschaften von IMETER ist die vollständige Transparenz. Lückenlos können die Eingangsdaten Weg, Zeit, Kraft, Temperatur ... aus den Ablesungen der Sensoren, die tabelliert und in Diagrammen aufbereitet werden, untersucht werden. Die automatisch generierten Prüfberichte listen zudem auch Zwischenergebnisse auf. Dadurch, dass Rohdaten gespeichert werden, stehen diese für Neuberechnungen jederzeit, sogar noch zur Prüfung anderer Theorien, zur Verfügung. Hierzu aber unten mehr. An dieser Stelle soll zuerst noch die weitere Behandlung der Viskositätsmessung thematisiert werden. - Bei relativ geringen Strömungsgeschwindigkeiten / höherer Viskosität ist die IMETER-Ringspaltgleichung unmittelbar anwendbar und liefert bereits ziemlich korrekte Ergebnisse. Anders sieht es aus, wenn Trägheitseffekte der Strömung berücksichtigt werden müssen. Dies ist im typischen Arbeitsbereich der Standardausführung von DiVA für Fluide mit η<100 mPa·s der Fall. Dann nämlich stammt ein Teil der gemessenen Kraft aus der parallel erzeugten kinetische Energie. Die Kinetische-Energiekorrektur entspricht dem Term "½mv²" wobei für v die mittlere Strömungsgeschwindigkeit vm eingesetzt wird (vm = v0·ra²/(ra²-ri²) ) und m (die Masse) aus Dichte und Strömungsvolumen stammt. Die IMETER-Methoden M5 und M6 bestimmen simultan die Dichte der Flüssigkeit, so dass die Korrekturgrößen automatisch zur Verfügung stehen. Mit dem Quadrat der Geschwindigkeit wächst neben dem Druckverlust durch die kinetische Energie auch ein Druckverlust durch die Reibung im Einlauf des Ringspalts und zur Parallelordnung der Strömung. Entsprechend wird der Energieterm (½mvm²) mit einem Geometriefaktor zeta ζ ergänzt, so, dass die Nettokraft für die Ringspaltgleichung letztlich mit Fζ = ½ vm²·ζ·ρ·π·ri² korrigiert wird. Es konnte nicht gefunden werden, dass die Auftrennung des Terms für quadratische Strömungseinflüsse (entsprechend einem Bagley-Plot) einen Vorteil mit sich bringt. ζ erhält man aus der Messung der Scherratenabhängigkeit der Viskosität (rheologische Messung) an einer newtonschen Flüssigkeit als den Faktor, der den Graphen im Rheogramm (Viskosität gegen Scherrate) die Viskosität zu einem konstanten Verlauf d.h. einer Konstanten bringt (z.B. bei 0.8 mm Spaltweite und 40mm Spalthöhe wird ein ζ von ~1.3 erhalten. Weitere Korrekturen betreffen die Auftriebskraft von Zylinder (Fρ) und der Suspension / Aufhängung (Fhρ) sowie auch deren Ringspalt-Reibung im Fluid (Fhη), die rekursiv in einem Iterationsschritt bestimmt wird. Der Kraftbeitrag des Meniskus an der Zylinderaufhängung (FΘ) kann/wird als Konstante im Meniskuseliminierungsverfahren normalerweise austariert (sie könnte im Prozess der Meniskuseliminierung auch unmittelbar vor der Viskositätsmessbewegung für bestimmte Geschwindigkeiten empirisch bestimmt werden). Die betroffene Länge der Suspension - sowohl für die Auftriebskorrektur und den Reibungsterm - kann ebenfalls das selbstlernende Teil-Verfahren per Füllstandsmessung autogen ermitteln (Einzelheiten vgl. Anleitung zu DiVA-A1). Fw = F° - Fρ - Fζ - Fhρ - Fhη - FΘ Die Reynoldszahl wird wie bei Rohrströmungen mit der charakteristischen Länge d für den Ringspalt aus dem hydrodynamischen Radius mit d = 2(ra-ri) berechnet: Re = ρ · vm · d / η KalibrierungDie Methode M5 DiVA verwendet keine Kalibrierfaktoren. Die Feinjustierung erfolgt durch Messung von Standardfluiden (Wasser, Luft, Normalproben der Viskosität). Eine bei der Messung von Kalibrier- oder Normalfluiden festgestellte Abweichung wird durch Auslegungungen unterhalb der Messtoleranz in der Messkörpergeometrie behoben. Es handelt sich dabei typisch um einige µm oder Bruchteile davon. Insofern kann, wenn einmal hochexakt präzise Messkörper zur Verfügung stehen, die Viskosität über angeschlossene Normale von Zeit/Länge und Kraft (Masse) mit DiVA metrologisch absolut dargestellt werden. Sozusagen absolut absolut. Für praktisch relevante Genauigkeitsanforderungen können - abgesehen vom Innendurchmesser der Röhre - die Proportionen der Teile von DiVA innerhalb des IMETER-MessSystems durch Mittel und Methoden, die das System selbst enthält, bestimmt werden. Im Einzelnen dienen als Bordmittel hierzu das eingebaute E2 Justiergewicht der Wägezelle für die Massebestimmung. Die geometrischen Abmaße sind über den Vergleich mit Normal-Endmaßen zusammen mit der Plattformsteuerung möglich; Dichte, Volumen und Ausdehnungskoeffizient sind über die fehlerfreie Dichtemessung exakt messbar (→ IMETER-Dichtemessung). Das IMETER MessSystem ist damit ein autarkes und autonomes Viskositätsmessgerät.
Wie aus Kraftmessungen z.B. die Temperaturabhängigkeit der Viskosität erhalten wirdIMETER speichert bei Messungen auch die Rohdaten. Damit können frühere Messungen mit künftigen Theorien oder nachkorrigierten Messkörperdaten stets neu berechnet werden. Woran nicht zu deuteln ist, ist a priori die Beobachtung, d.h. die Ablesung der Sensordaten. Während bei Geräten anderer Hersteller und Messprinzipien Rohdaten von eher kryptischer oder zumindest partiell willkürlicher Natur sind (Drehmomente, Drücke, Durchlaufzeiten), stammen die IMETER Rohdaten aus geordneten Zusammenhängen mit separat kalibrierbaren Datenquellen. - Wie hier aus Kraft und Geschwindigkeit in der geometrischen Anordnung die Flüssigeigenschaft hervorgeht, dazu im Folgenden Dokumente aus einer Messung. |
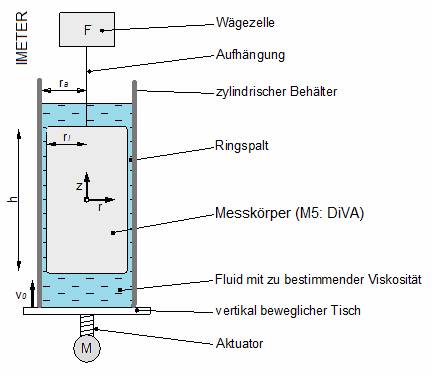
; es ist in eine ausrichtbare Halterung eingestellt. Am Boden des Gefäßes ist ein Zugang in den Probenraum über den ein Temperaturfühler eingeführt ist sowie zwei dünnere Schläuche für den Probenwechsel.")


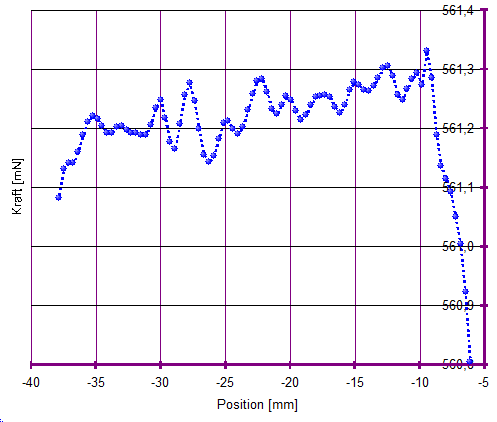
| Das Diagramm rechts (Abb.3) zeigt die Rohdaten eines Viskositätsmesswertes. Gegen die X-Achse, die die Position der Zylinderunterkante in der Röhre anzeigt, ist die gemessene Kraft angetragen. (Das Diagramm ist der Rohdatenansicht der automatischen Dokumentation entnommen; hier werden Positionen oberhalb des Bezugspunktes <Boden der Röhre> negativ angezeigt, weil die Plattform zur Messung der Zugkraft nach unten läuft). Aus der Ruhelage bei -5mm wird der Messkörper mit konstanter Geschwindigkeit gezogen. Weil Kraftwerte aus der Wägezelle bereits vor dem Beginn der Bewegung aufgezeichnet werden, wird die Ausgangskraft miterfaßt. Mit der Bewegung steigt die Kraft steil an und erreicht einen stationären Wert. Die stationäre Kraft (F°) hier bei 561 mN, bedarf, wie beschrieben, einiger Korrekturen bevor sie als Eingangswert Fw für die Ringspaltformel verwendet werden kann. |
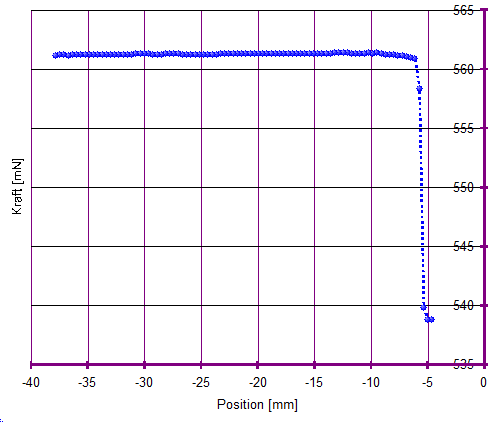 Abb.3 - ein Viskositätsmesswert Abb.3 - ein Viskositätsmesswert |
|
Abb. 4 zeigt vergrößert die Einzelwerte der stationären Kraft von der Messkurve in Abb.3. Die so erkennbare Schiefe und Rauigkeit des Verlaufs bilden per Mittelwert und Standardabweichung einen Beitrag in der Berechnung der Messunsicherheit - zusätzlich zu den geometriebedingten Messunsicherheiten und der Messunsicherheit von Temperatur, Masse und Fallbeschleunigung. Die Rauigkeit der Kurve - das sind Druckschwankungen - wird zu Noise quantifiziert und berechnet: Noise wird erhalten, indem für jedes Kraftwertepaar |ΔY|/ΔX summiert wird (numerisch integriert). Der Mittelwert davon in der Einheit µN/mm wird ausgegeben. |
Abb.4 - Der Messwert gezoomt. Die Schiefe und Streuung liefert einen Beitrag in der Berechnung der individuellen Messunsicherheit des Viskositätsmesswertes. |
| Rheologische Messungen zeigen bisweilen bei bestimmten Scherraten bemerkenswerte Maxima (z.B. Buttermilch mit 'Butterflocken').
Die Daten stammen aus einer Messung an einem Motoröl. Dabei wurde die Temperatur stufig von 100, 80, 60 nach 40°C geändert. Daher stammen die Messkurven der Abb. 3 bis 5. In Abb.5 sind alle 36 Messkurven übereinander gelegt. Die neun je Temperaturniveau zusammenfallenden Kraft-Weg-Kurven zeigen sich untereinander als deckungsgleich reproduzierbar. Die Lageunterschiede der stationären Kräfte im Temperaturabstand von 20 K (keine Zeiteffekte) sind praktisch nicht ununterscheidbar. Den Bericht zu dieser Messung finden Sie als PDF hier: Motoröl_100-40°C.pdf |
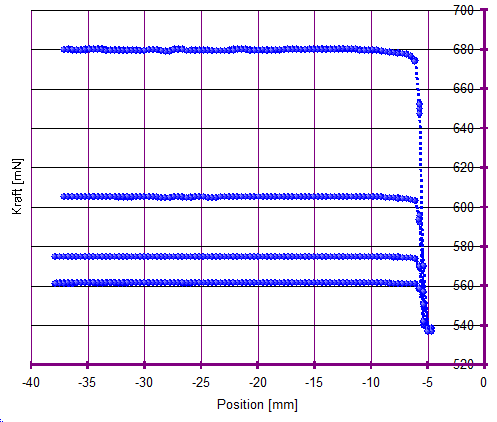 Abb.5 - Messung der Temperaturabhängigkeit (36 Messwerte) Abb.5 - Messung der Temperaturabhängigkeit (36 Messwerte) |
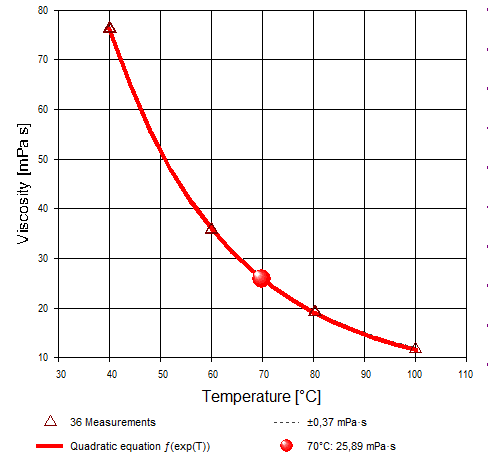
| Die Auswertung unter Berücksichtigung der Temperaturabhängigkeit der Körper und Dimensionen erlaubt die Berechnung der Viskosität zur jeweiligen stationären Kraft.
Abb. 6 zeigt die erhaltenen 36 Viskositätswerte als Dreiecke und mit einer geeigneten Regressionsfunktion gefittet (rote Linie). So können dazwischen liegende Viskositätswerte über die Funktionsgleichung interpoliert werden.
|
Abb.6 - Temperaturabhängigkeit der 36 Messwerte. |
|
Es wird die Reportansicht gezeigt, in der ein Ausschnitt der tabellarischen Daten gezeigt wird. Neben den kennzeichnenden Angaben in der ersten Tabelle finden sich in den beiden anderen Listen auch die berechneten Korrekturen, die Fehlerangabe und Messkörperdimensionen (vgl.: Motoröl_100-40°C.pdf). |
|